|
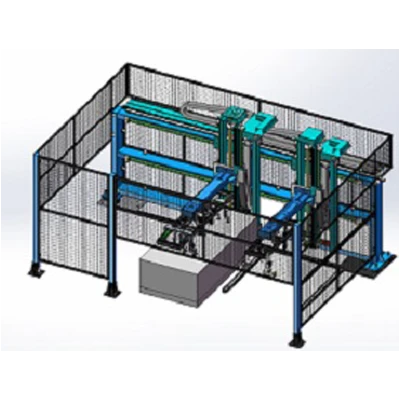
Funktion och introduktion
Att gripa glaset och sätta det till transmissionsledningen.
1. Glaslastningssystemet består av robotarm som rör sig i glas och robotarm för pappersplockning.
2. Maskinen innehåller två glasförvaringsstationer och en pappersförvaringsstation.
3. Glas rörlig robotarm sätter glas till transmissionsledningen, samtidigt som pappersplockningsrobotarmen tar bort papperet.
4. Maskinen som drivs av servomotor, sugaren drar glas till utsedd station.
5. Glaslastningsrobotarm har fribärande struktur och pappersplockningsrobotarmen är en portalstruktur.
Huvudparameter
Modulformat: (1580-2000)mm*(800-1000)mm
Cykeltid :<35s
Max capacity: >2468/dag
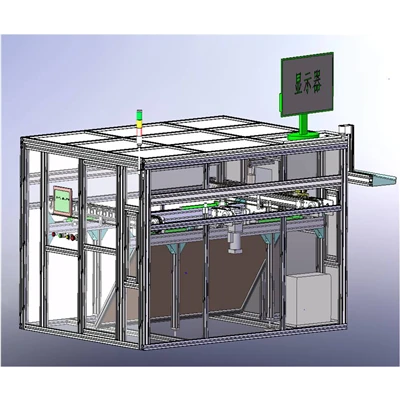
Operatör online: ingen
Märkeffekt: 8,26kw
Tryck: 0.7MPa+0.1
Inspänning: 380V
Mått: 4610mmx2780mmx2150mm
Fördel
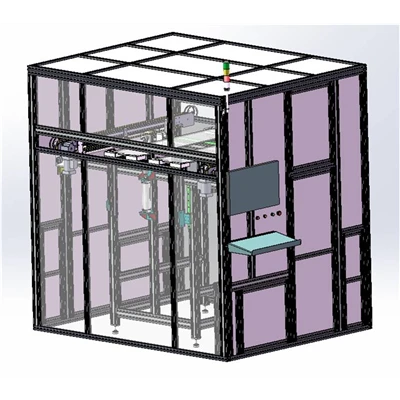
1. Maskinen använder stålkonstruktion med svetsramkropp, hög hållfasthet, tillförlitlighet och beständighet under lastning.
2. Glasbärarens sugplatta är gjord av polyuretan som inte gör tryck på glaset under lastning.
3. Servomotorn är exakt och stabil igång.
4. Maskinen är utrustad med säkerhetsstängsel för att säkerställa driftsäkerheten.
5. Minska osäkerheten vid lastning av operatören, förbättra produktionen.
6. Maskinen är helautomatisk och kräver ingen mänsklig inblandning.
|